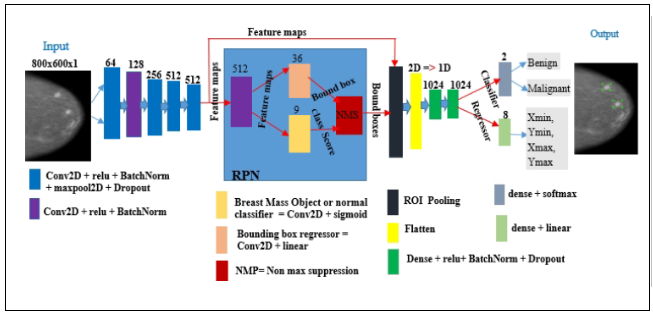
Breast cancer is prevalent in Ethiopia that accounts 34% among women cancer patients. The diagnosis technique in Ethiopia is manual which was proven to be tedious, subjective, and challenging. Deep learning techniques are revolutionizing the field of medical image analysis and hence in this study, we proposed Con- volutional Neural Networks (CNNs) for breast mass detection so as to minimize the overheads of manual analysis. CNN architecture is designed for the feature extraction stage and adapted both the Region Proposal Network (RPN) and Region of Interest (ROI) portion of the faster R-CNN for the automated breast mass abnormality detection. Our model detects mass region and classifies them into benign or malignant abnormality in mammogram(MG) images at once. For the proposed model, MG images were collected from different hospitals, locally.The images were passed through different preprocessing stages such as gaussian filter, median filter, bilateral filters and extracted the region of the breast from the back- ground of the MG image. The performance of the model on test dataset is found to be: detection accuracy 91.86%, sensitivity of 94.67% and AUC-ROC of 92.2%.
Researches
Breast Cancer Detection using CNN
Deep Learning-based Amharic Question and Answering system for FAQs in Universities
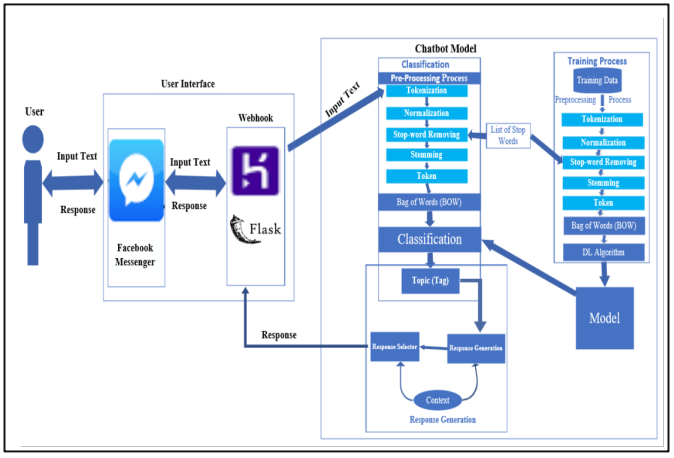
University students often spend a considerable amount of time seeking answers to common questions from administrators or teachers. This can become tedious for both parties, leading to a need for a solution. In response, this paper proposes a chatbot model that utilizes natural language processing and deep learning techniques to answer frequently asked questions (FAQs) in the Amharic language. Chatbots are computer programs that simulate human conversation through the use of artificial intelligence (AI), acting as a virtual assistant to handle questions and other tasks. The proposed chatbot program employs tokenization, normalization, stop word removal, and stemming to analyze and categorize Amharic input sentences. Three machine learning model algorithms were used to classify tokens and retrieve appropriate responses: Support Vector Machine (SVM), Multinomial Naïve Bayes, and deep neural networks implemented through TensorFlow, Keras, and NLTK. The deep learning model achieved the best results with 91.55% accuracy and a validation loss of 0.3548 using an Adam optimizer and SoftMax activation function. The chatbot model was integrated with Facebook Messenger and deployed on a Heroku server for 24-hour accessibility. The experimental results demonstrate that the chatbot framework achieved its objectives and effectively addressed challenges such as Amharic Fidel variation, morphological variation, and lexical gaps. Future research could explore the integration of Amharic WordNet to narrow the lexical gap and support more complex questions.
Experimental Investigation of Mutual Collision Avoidance Behavior for Multiple Mobile Robots
GitHub: Multi-robot Path planning
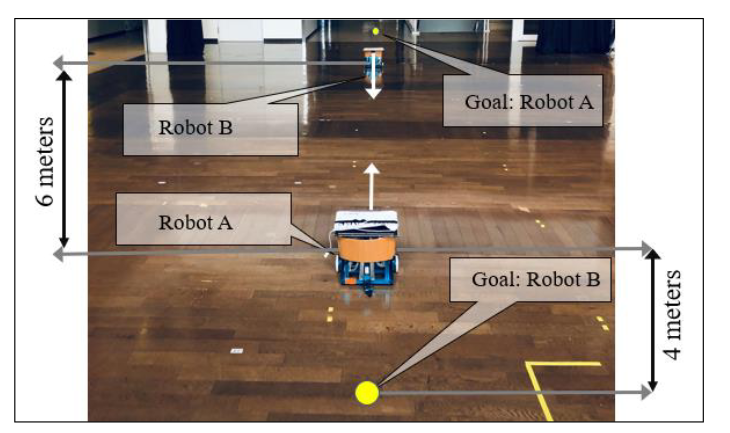
In an environment where multiple robots co-exist together as a group, it is important to ensure safe navigation for all robots i.e., the robots are supposed to have a real-time oscillation-free and collision-free motion planning. In a centralized system of architecture where a single central entity manages all the activity, it would be easy to have an optimized generic solution that works for all robots. On the contrary, in a decentralized system of architecture where neither central entity exists supervising the whole phenomena nor does any form of communication-explicit or implicit-exists between or among the constituent robots, it is challenging to come up with a generic collision avoidance model that works for all robots and ensures good overall mutual behavior. In such situation, oscillation problem where robots synchronously jiggle their avoiding direction is prevalent. In this paper, we have proposed a way for realizing multi-robot collision avoidance without oscillation problems by extending a method that was originally developed as a collision avoidance method for a single robot in a dynamic environment. We aimed to eliminate the oscillation problems by first finding the key parameters that affects the motion behavior of the robots. Those key parameters are variables that lead to different interaction behavior when plugged with different values. We have found three parameters that affect the robot's behavior, those are sensing range, update frequency of local path generation and robot's maximum angular velocity. Lastly, repetitive experiments are conducted for each of the specific parameter thereby assigning different values for different robots and the experimental results are assessed to gauge the number of oscillation cases and non-oscillation cases occurred. The experimental result showed that different values of sensing range for different robots have eliminated the possibility of oscillation and likewise assigning different values of update frequency of local path generation and robot's maximum angular velocity for different robots have substantially decreased the number of oscillation cases compared to the number of oscillation cases of experiment with no parameter change applied