About Me

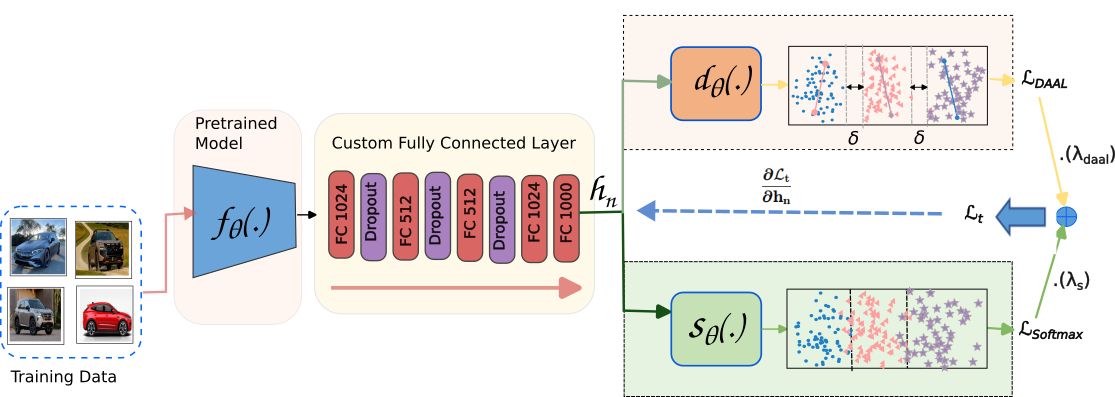
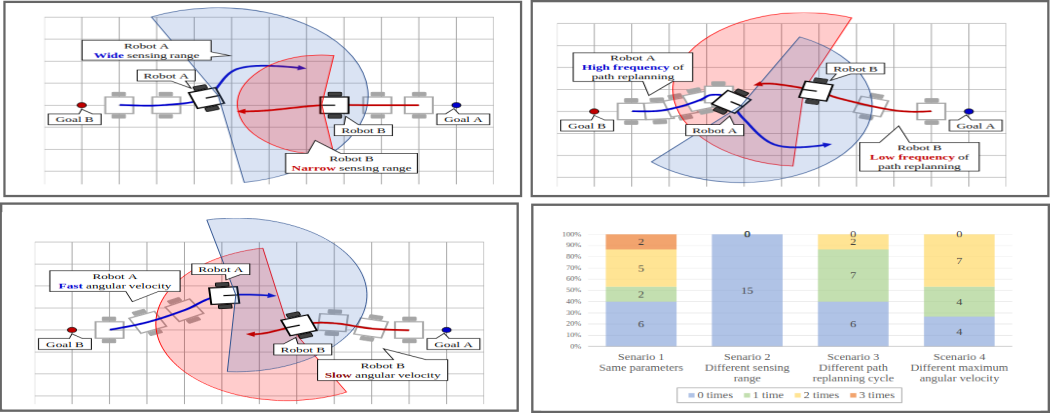
I’m Hadush Hailu, a Master’s student in Computer Science at Maharishi International University (USA), graduating December 2025. Under supervision of Prof Ankhtuya Ochirbat my research spans multimodal learning and deep metric learning, with prior work in multi-robot collision avoidance from my second Masters in robotics at the Intelligent Robot Laboratory , University of Tsukuba (Japan) under Prof. Akhisa Ohya and Prof. Aynori Yorozu .
I am seeking PhD opportunities starting in Spring 2026, with research interests in vision–language–action for generalist manipulation, computer vision, and applications in agricultural and service robotics. I am also interested about collaborative research and participation in international robotics competitions. You can reach me out at had.hailu [at] gmail.com